Undulation Doesn’t Exist – Not in Dolphins, Not in Monofin Swimmers
In the AIDA manuals where I describe monofin swimming technique, I explain the role of the Triangle Block and the importance of seeking support with the top of that block on the water. This search for support—though visible—is not the beginning of a wave propagating backwards. It is a synchronized movement with the lifting of the fin, aiming to reposition the fin efficiently for the next propulsive phase.
One cannot analyze the hand movement in isolation. At the exact moment the hands rise, the swimmer is simultaneously repositioning the fin at the other end of the body. There is no linear descending propagation of a motor signal from the hands to the legs. What we observe is simultaneous coordination of the upper and lower body: the hands rise, the fin rises, the body rebalances and resets into Position A (see the manual diagrams), ready to project forward through the active descent of the fin.
It is this action of the fin on the water that generates a reaction force. And this is where real propulsion begins, which the swimmer directs forward by organizing alignments throughout the body.
The dolphin does exactly the same thing. When it initiates propulsion, its beak lifts—not to initiate a wave propagating through the body—but to accompany the repositioning of its tail, in a global gesture of coordinated extension. It is not a descending motor signal. It is the visible expression of tonic engagement, of longitudinal tension through the anterior muscle chain, from the tail to the head.
What we see at the head is not a “starting wave” — it is the consequence of an organized, simultaneous movement of the entire body, aimed at directing the propulsive force generated by the tail forward. In humans using a monofin, the principle is identical: the lifting of the Triangle Block is not the initiation of a wave descending through the body—it is the visible anterior part of a coordinated repositioning, preparing for the upcoming propulsion by the fin.
As the saying goes: when someone points at the moon, “those who do not yet understand” look at the finger. That is exactly what happens here: we look at the swimmer’s hands as if they were the source of the movement—as if their elevation triggered a wave traveling down the body.
But the hands are just the “finger”: a visible, partial indicator of something happening elsewhere. What we need to observe is the “moon”: the entire body organizing itself, resetting, tensing, and preparing—in global coordination—to propel the monofin in a structured and directed way. Technical movement does not originate from the extremities: it emerges from internal alignment, bodily strategy, and active transmission of force. Those who watch only the hands will never see the true movement—they’ll only see the effect, never the cause.
Conclusion:
“Undulation doesn’t exist! Not in dolphins, not in monofin swimmers. What exists is a driving force initiated from a posterior push and transmitted through a structured body.”
“Monofin swimming technique is the art of projection.”
So become artists of projection! Now go — get back in the water. You’ve read enough for today.
Technique and Style : definitions
Technique, from the Greek ‘tekhne’ is defined as an art, skill, method, set of principles by which ‘something’ is achieved or created (Oxford Dictionaries). Teaching swimming technique (monofin technique) means imparting specific motor skills to achieve an objective, for us: moving efficiently underwater, hold breathing, with a monofin. Based on scientific knowledge, and taking into account environmental, material and regulatory constraints, the Technique proposes a theorisation of the most efficient movement.
Style is a personal interpretation of the technique, and the athlete uses his or her own resources to apply the swimming technique. ‘The result of teaching technique is a swimming style’. Basil Grammaticos.
The technique for swimming with a monofin will vary according to the discipline (DYN, CTW, SPEED APNEA) and must take into account the following parameters:
Discipline regulation : CTW and DYN are regulated, but to my knowledge there are no specific limitations on the use of a monofin to perform in these disciplines. Nevertheless, it should be noted that the DYN and CTW in bifins and with a monofin records have been differentiated, which means that two swimming techniques that used to coexist can now be isolated. Through its decisions, the sporting institution influences swimming technique.
The Equipment : All monofins currently in use take account of CMAS regulations on monofins dimensions. As I described a little in my basic knowledge of the monofin and footpockets, technical innovations influence swimming technique and can lead the sporting institution to legislate to control the development or safety of the discipline. In the 2000s, with the advent of the Andronov footpocket, the CMAS regulated the dimensions of the monofin, which now had to fit into a wooden box that defined its length, width and height (max 760x760x150 in mm). By default, freedivers use monofins from finswimming.
The laws of hydrodynamics and their biomechanical consequences : The laws of hydrodynamics help us to understand the environment in which swimmers move. But ‘it is above all the biomechanical consequences (of the swimmer’s behaviour) that will have the greatest influence on swimming technique. The swimmer’s activity, in relation to biomechanics, must therefore take fluid mechanics into account to a large extent’ Didier CHOLLET.
The athlete : Whether we refer to general data on the human body or to personal characteristics, information such as :age, sex, height, weight, muscular quality, fat mass, length of segments, neuromotor qualities of the individual, energy profile, motivations etc… All must be taken into account. All this information can influence technical adaptations.
How to theorise a swimming technique?
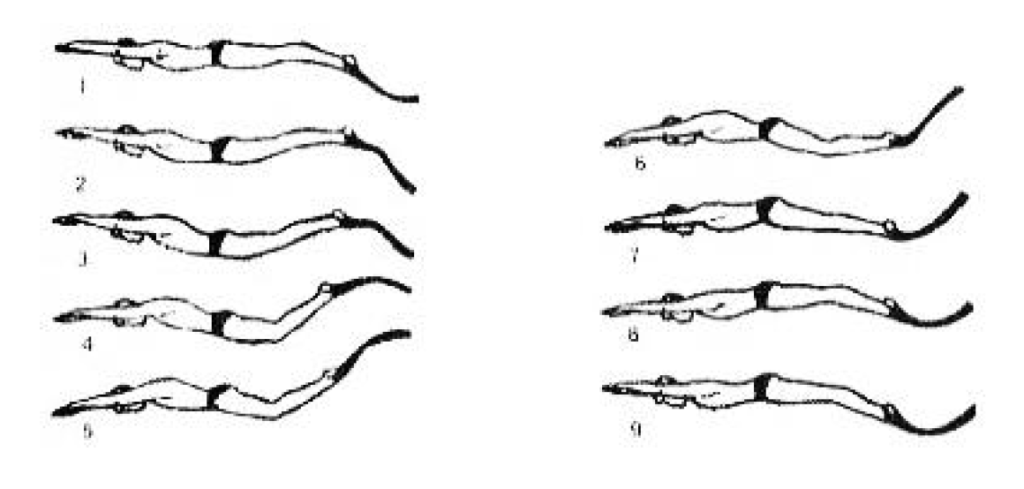
The swimming technique can be theorised by creating drawings detailing the stroke in chronological order, like a kinogram. This method will give the reader a mental representation of the stroke, but it is too rigid and doesn’t really offer the possibility of evolving over time.
« kinogram » : Underwater dolphin kick by Popov ( La Technique de Nage en Monopalme, 1991 Basile Grammaticos)
To try and give you my ‘version’ of swimming technique, I’m going to follow the method of one of my teachers at the University of Sciences and Techniques of Physical and Sports Activities (S.T.A.P.S) in Montpellier, Didier Chollet, who suggests presenting swimming technique in the form of technical principles to be respected.
Swimming technique and its principles are acquired through hard work. You therefore need to understand them and practise them to be able to express yourself in an effective style. You will then have the knowledge to understand the effects of certain actions and/or interactions and you will be able to act on them in a coherent manner.
The solution lies in practice! So go and swim!
References: – La Technique de Nage en Monopalme, 1991 Basile Grammaticos – Approche Scientifique de la Natation Sportive, 1992 Didier Chollet – Technologies et Techniques des Sports : le regard de l’histoire et des sciences humaines et sociales, 2017 Luc Robène
Laws of hydrodynamics
Moving efficiently underwater with a monofin in order to achieve a performance requires an understanding of the monofin swimming technique. To fully understand this technique, you need to have an idea of the laws of hydrodynamics. These laws allow you to understand the environment in which you are moving and help to establish technical principles.
When you move through water, you will encounter and create resistance. These resistances tend to slow down your movement.
Forward resistance
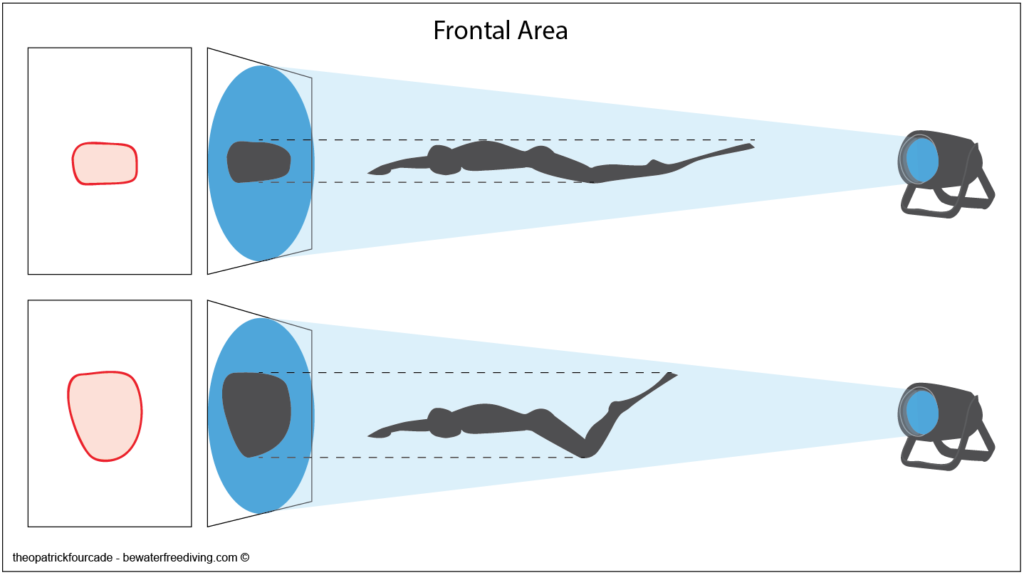
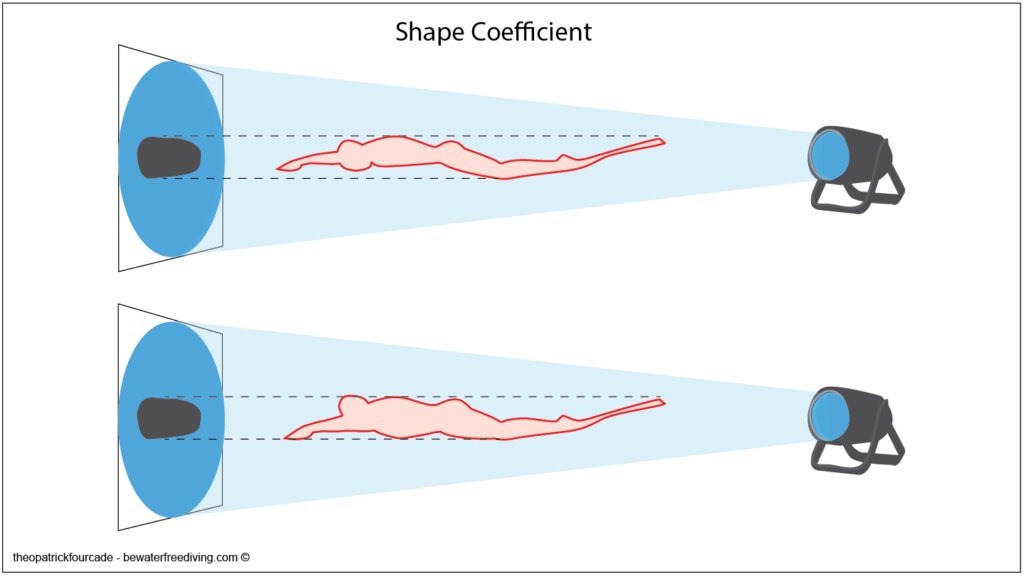
Two important concepts are those of frontal surface and form coefficient :
Frontal Area : it is the cross-section of the body moving through the water, which is exposed to the resistance of the water.
The ‘Shape Coefficient’: This is the total shape of the body. The same master couple can be presented with a different total shape.
As this shape moves through the water, it will generate certain resistances. All these resistances are called ‘Passive Resistance’. It is the sum of three resistances identified by Counsilman (1968):
Passive Resistance
Frontal resistance
Friction resistance
Drag resistance
These resistances are known as passive, and are the result of the action of the water on the swimmer’s body, which the swimmer undergoes passively.
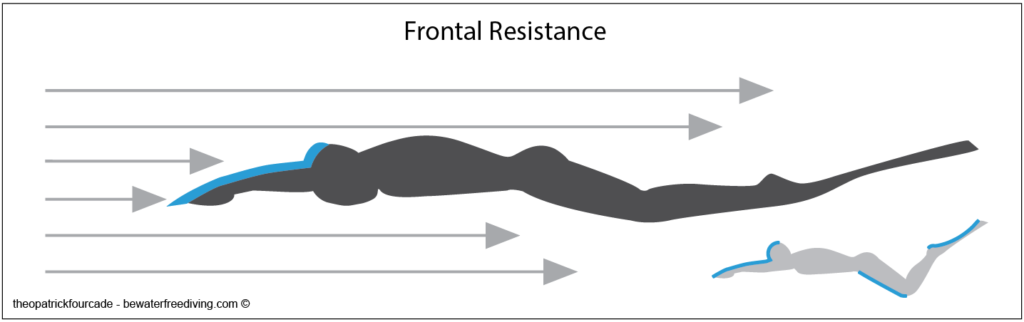
Frontal resistance This is the resistance created by the surface of the body facing forward. This surface is called the master torque, and it will create resistance when entering the water.
Frontal resistance differs according to technical mastery
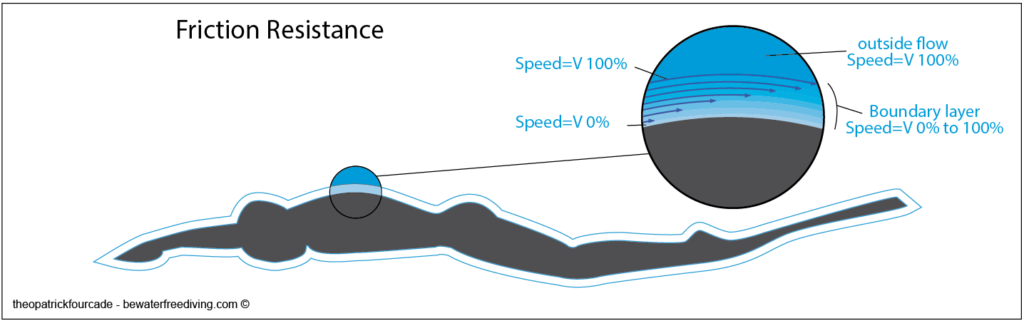
Friction resistance As the swimmer moves through the water, the water molecules closest to the body (skin or wetsuit) adhere to it. The speed of these molecules is therefore zero. As you move away from the body, the speed of these water molecules increases until it reaches the speed of the other water molecules in the ‘outer flow’. The thin layer of water in which the velocity increases is called the ‘boundary layer’ (Jacques Lachnitt 1978). The fact that two infinitely adjacent layers of water have different velocities results in significant viscosity forces. This is known as frictional resistance.
Representation of the boundary layer within which the speed of water molecules increases
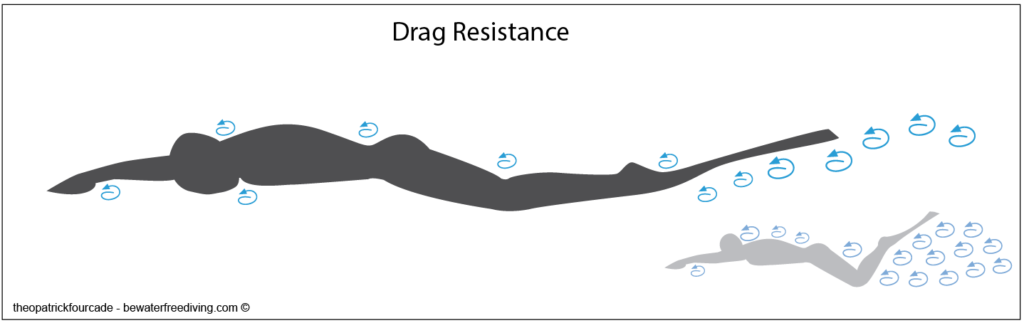
Drag resistance This is a vortex resistance also known as tail suction. This resistance to forward motion is extremely detrimental: it causes a suction effect at the rear of the body.
The less hydrodynamic the shape, the greater the drag.
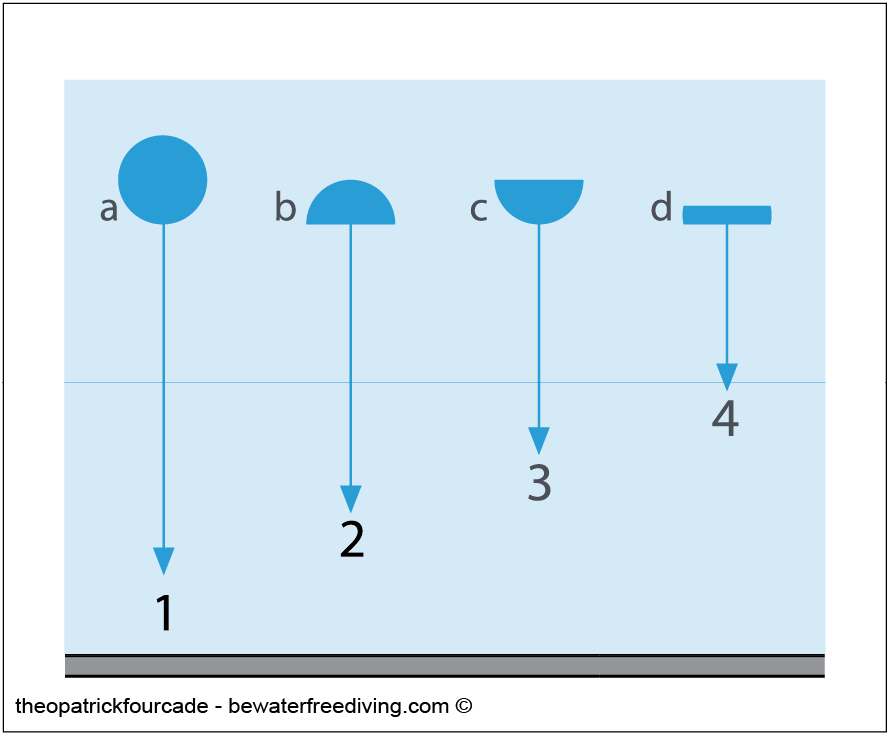
NB: Between the frontal resistance and the drag resistance, which of these two resistances is the most penalising? The results of the following experiment provide an interesting answer. When 4 objects (a, b, c, d) of the same weight and the same surface area are dropped into the water (assuming they maintain their trajectory as they fall), their order of arrival on the ground will depend on the size of their frontal resistance and their drag resistance. – The sphere ‘a’ arrives first: it has less frontal and drag resistance than the other three objects. – The disc ‘d’ comes last: it has more drag and frontal resistance than the other three objects. – Half-sphere ‘b’ comes before half-sphere ‘c’. Conclusion: drag resistance is more penalising than frontal resistance.
NB :Wave resistance Wave resistance is linked to movements close to the surface of the water. As the swimmer moves, they create a zone of turbulence that produces waves: the front wave at the front of the body and the tail wave at the back. These two waves slow down the swimmer’s progress because they form high-pressure zones. To minimise this resistance, the finned swimmer uses the position of his hands to create an additional wave at the front of the body, which interferes with the bow wave to give rise to a reduced resultant wave, known as the Bulb effect. At the bow of some boats there is a cylindrical bulge called a bulb. Its function is to create an additional wave at the bow, the trough of which falls where the bow wave should be. The two waves interfere negatively and tend to cancel each other out, which considerably reduces resistance. During a Dynamic event, a freediver may be confronted with this resistance if he gets too close to the surface. To avoid this resistance completely, he must remain at a depth greater than 3 times his body diameter throughout the event.
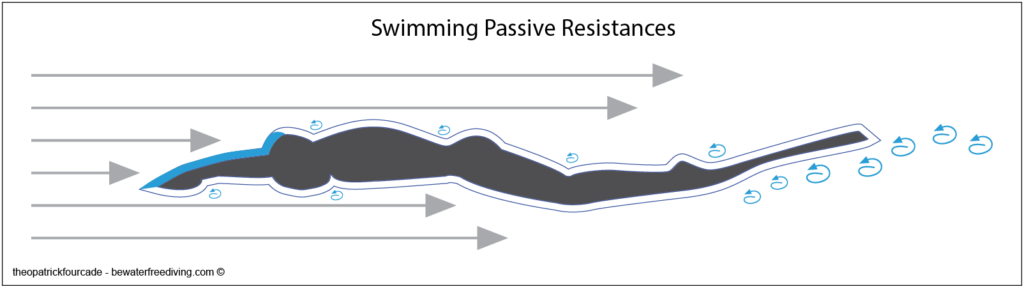
Summary of passive resistances
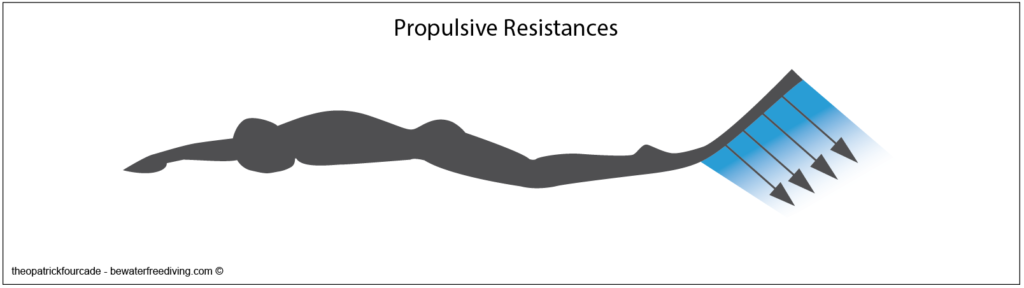
Aquatic propulsion
If we try to reduce passive resistances, we will also try to create active resistances that will act as propulsive supports: these are known as propulsive resistances. It is by creating and maintaining propulsive resistances that we move through the water.
The term ‘propulsive drag resistance’ is used for all resistances resulting from or contributing to propulsive drag.
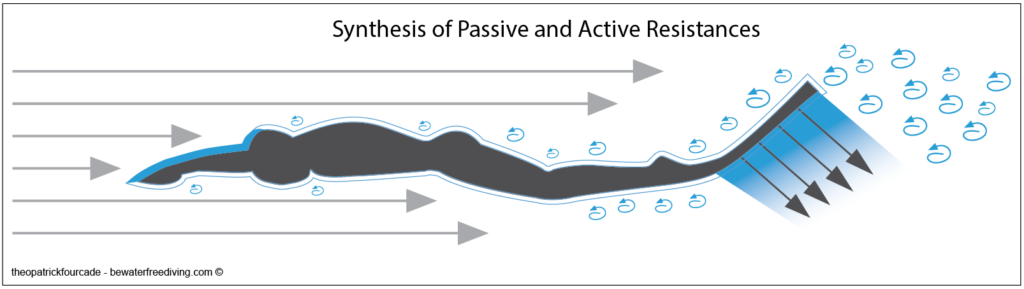
Synthèse de toutes les résistances passives et actives
Monofin swimming is the fastest of all strokes, the ‘Formula 1’ of fins sports. The swimming technique that has evolved over the last 50 years is the one that best adapts to the reduction in resistance to forward movement. It is the one that produces the propulsive movement with the lowest ratio of propulsive drag resistance.
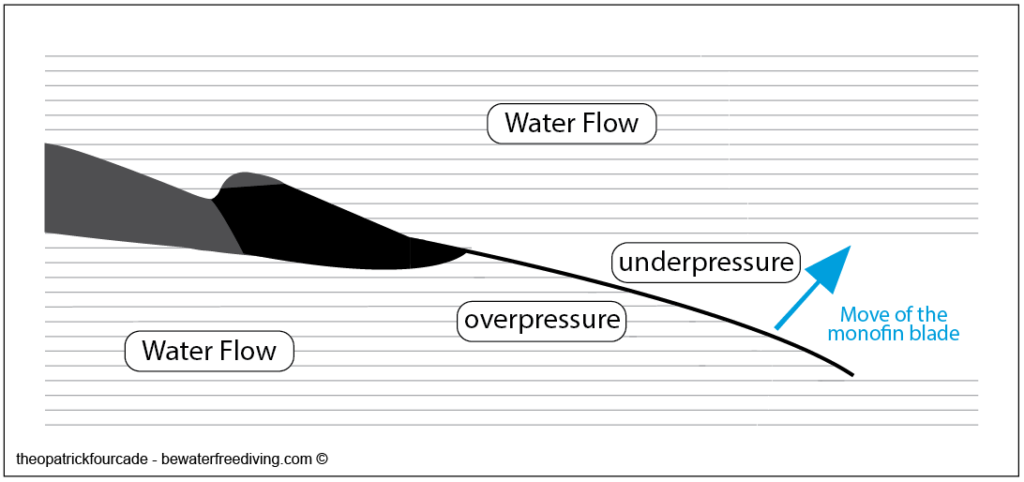
Hydrodynamic law applicable to the monofin
Is the monofin like an aeroplane wing? At least theoretically, we can consider that the monofin, under the effect of the flow of water (laminar flow) which passes under and over the monofin, creating a zone of high pressure (overpressure) and a zone of low pressure (depression), is helped in its horizontal replacement. The areas of overpressure repel, those of underpressure attract.
Résistance et Vitesse : R=KSV²
It is interesting to understand the equation R=KSV², which summarises the mechanical components of resistance to forward motion (R = Resistance, K = Coefficient corresponding to the shape of the body, S = Surface area of the master torque, V= Speed).
(NB: R=KSV² is true for a rigid body. However, swimmers have a variable geometry and try to minimise resistance. Physiological measurements show that for a swimmer the exponent is less than 2. Di Prampero gives an exponent of 1.2, which seems to be suitable for an immersion swimmer. For surface swimming, an exponent of 1.5 would be more realistic).
In this corrected equation, R=KSV^1.2, the velocity increased by an exponent shows that it is a determining component. If speed is zero, then resistance to forward motion is zero. However, when moving, the speed factor has an essential effect on resistance to forward movement. If the speed is 1 m per second, we have : R=KxSx1 If the speed is 2m per second we have : R=KxSx2,3 In apnea, we often speak of speeds of around 1m per second. Resistance to forward movement is therefore not increased by the speed component, but the fact remains that if your swimming style is not hydrodynamic (K and S are not optimised), then throughout your performance you will produce a greater effort than necessary to move forward.
For example, a finswimmer can reach 3.6m per second (R=KxSx4.65). Swimming fast means really coming to terms with different types of resistance. A good time implies an ability to reduce resistance to progress. Each time you improve your time, you will have objectively improved your style.
Swimming with a monofin for a freediver with an effective style is not an impossible task. Most of the technical faults that I observe in freedivers are mainly the result of poor or non-learning of the technique of swimming with a monofin. The result is significant passive and active resistance which, if reduced, would make it easier to perform, especially at the end of an effort: less fatigue, less oxygen consumption, less CO2 production, less lactate accumulation, more serenity, more lucidity, more efficiency, less risk of losing motor control, less risk of syncope.
So you need to optimise your style by working on your technique. To overcome resistance to progress, remember to include regular (timed) speed sessions in your pool training (using a front snorkel, for example, or working on the 100m speed apnea). It’s essential!
References : Approche Scientifique de la Natation Sportive, 1992 Didier Chollet La mécanique des fluides, 1978 Jacques Lachnitt The Science of Swimming, 1968 James E. Cousilman The Energy Cost of Human Locomotion on Land and in Water, 1986 Di Prampero (equation N°17)