Notions of hydrodynamics
Moving underwater with a monofin efficiently in order to achieve performance requires an understanding of monofin swimming technique. To understand this technique, you need to have an idea of the laws of hydrodynamics. These laws provide an understanding of the environment in which you operate and help establish some of the technical principles that I will discuss in the next article.
As you move through the water you will encounter and create resistance. These resistances tend to slow down your movement : we talk about swimming resistances.
Some technical terms translated from French maybe do not correspond exactly to the terminology used in English.
I hope to find among you a reader who will help me to be more precise. Send me message to : theo@ylon.com
Swimming Resistance
To understand the different forms of resistance you must first identify two things : the concept of the « frontal area » and the « shape coefficient ».
– the concept of the « frontal area » : It is the frontal surface area of the body that is exposed to the resistance of the water while moving forwards.
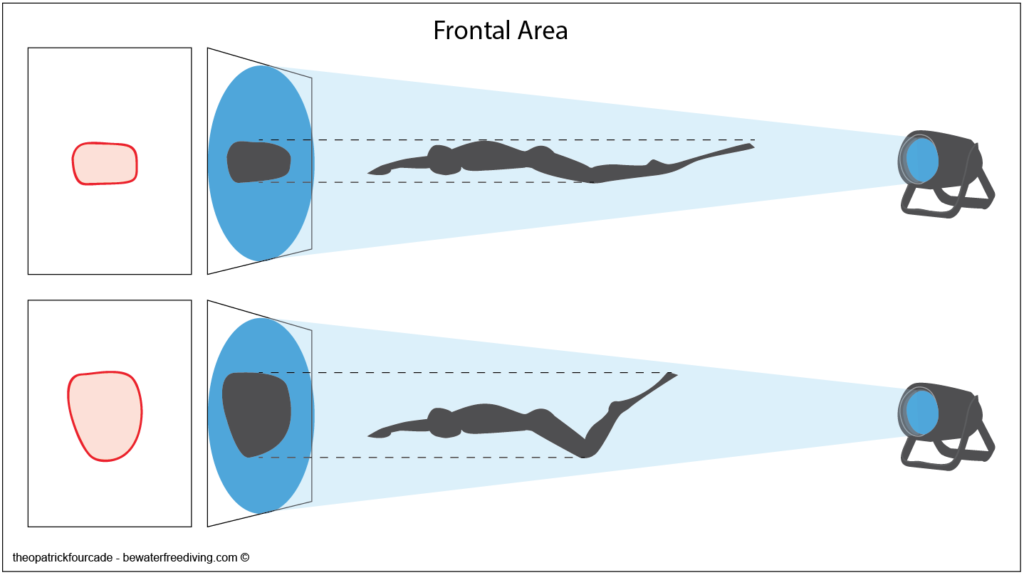
– the « shape coefficent » : It’s the total body shape. The same frontal area can be presented with a different total body shape
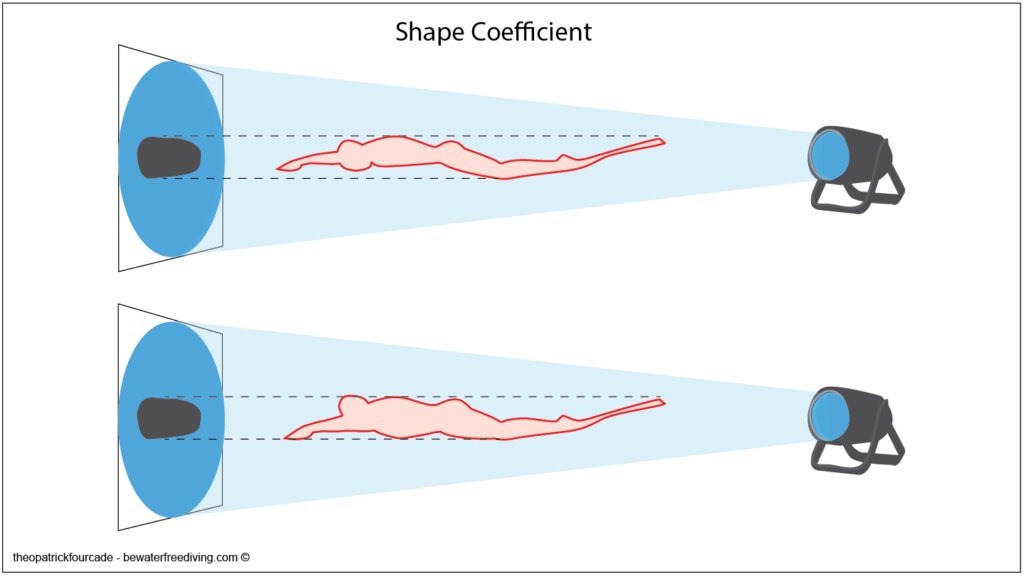
This Shape while moving in the water will generate resistances. All of these resistances are called « shape resistance » (ifl : resistance de forme). It is the sum of three resistances identified by Counsilman (1968) :
– Frontal resistance
– Friction resistance
– Drag resistance
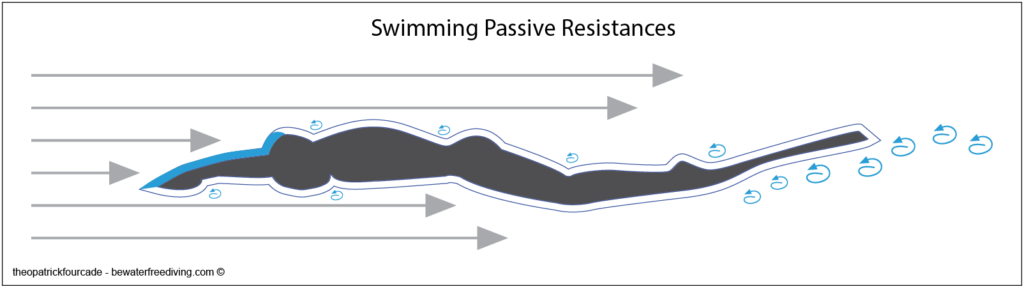
These resistances are called passive resistances, they are the result of the action of water on the body passively undergone by the swimmer.
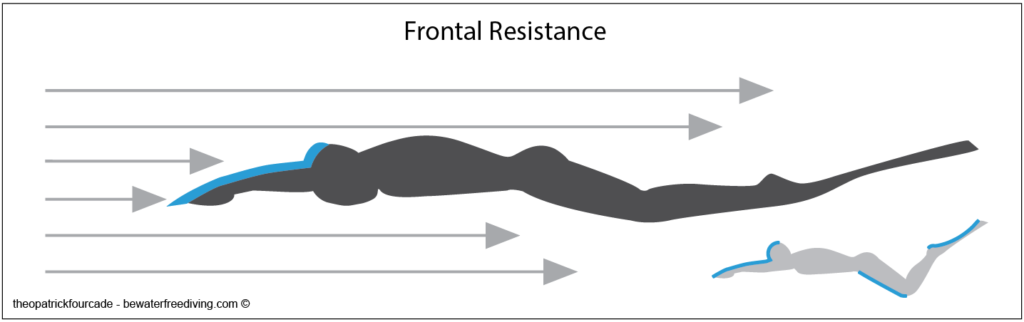
Frontal resistance
It is the resistance created by the surface of the body presented while moving forward. This surface is called the frontal area, it will create resistances when penetrating the water.
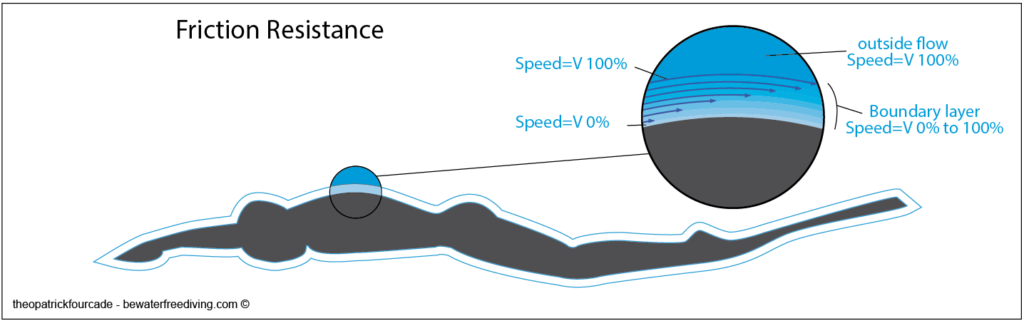
Friction resistance
As the swimmer moves through the water, the water molecules closest to the body (skin or wetsuit) adhere to the body. The speed of these molecules is therefore equal to zero. As one moves away from the body, the speed of these water molecules increases until they reach the speed of the other water molecules in the « outside flow ». The thin Layer of water in which speed increases is called the « boundary layer » (Jacques Lachnitt 1978). Because two infinitely adjacent layers of water have different speeds, this results in high viscosity forces. We are talking about Friction resistance.
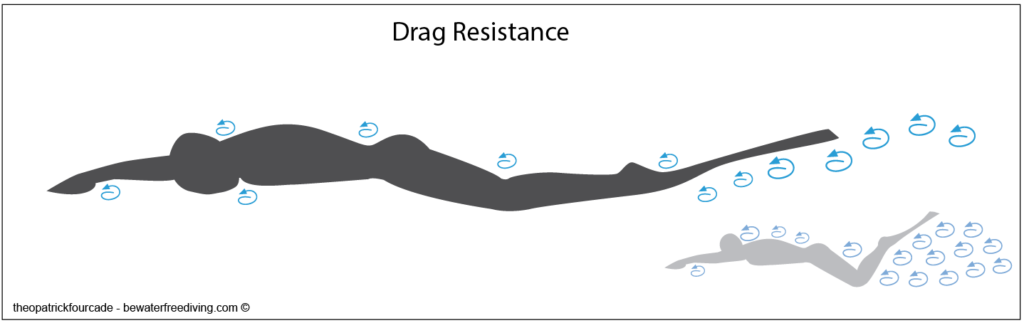
Drag resistance
It is a vortex resistance also called tail suction. This resistance to forward movement is extremely disadvantageous : it causes a suction effect at the back of the body.
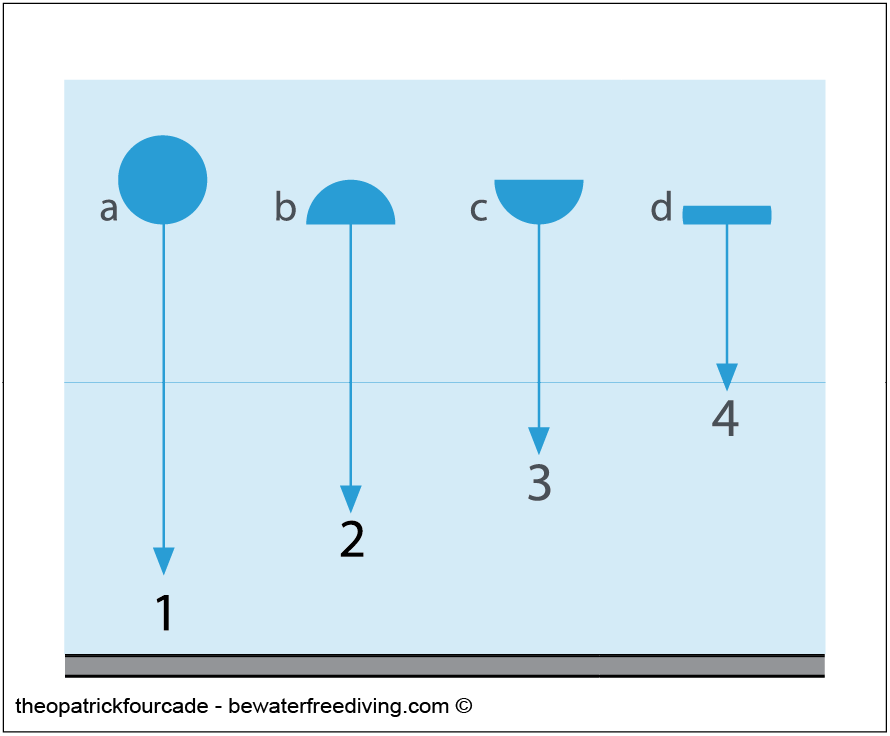
NB : Between frontal resistance and drag resistance, which of these two resistances is the most penalizing ? Reading the result of the experiment that follows provide an interesting answer. When 4 objects (a, b, c, d) of the same weight and frontal area are dropped in the water (considering that they keep their trajectory during their fall) their order of arrival on the ground will depend on the importance of their frontal resistance and drag resistance.
– Sphere « a » comes first : it has less frontal resistance and drag resistance than the other three objects.
– Disc « d » comes last : it has the most frontal resistance and drag resistance than the other three objects.
– Half Sphere « b » comes before Half Sphere « c »
Conclusion : drag resistances are more penalizing than frontal resistances.
Wave resistance
Wave resistance is related to movements close to the water surface. As the swimmer moves, he or she creates an area of turbulences causing waves : the frontal wave in front of the body and the tail wave in the back. These two waves hinder the swimmer’s progress because they form zones of high pressure. To minimise this resistance the mono-finswimmer creates with the position of his hands an additional wave at the front of the body which interferes with the bow wave to give rise to a reduced resultant wave, this is called the Bulb effect. At the front of some boats there is a cylindrical bulge called a Bulb. Its function is to create an additional wave at the bow where the trough falls where the bow wave should be. The two waves interfere negatively and tend to cancel each other out, which considerable reduces resistances. During a DYN event, a freediver may face this resistance if he gets to close to the surface. To completely avoid this resistance it will be necessary to be at a depth greater than 3 times the diameter of its body throughout the dive.
Synthesis of passive resistances
Aquatic Propulsion
If we seek to reduce passive resistances, we will also seek to create active resistances that will serve as propulsive supports : we then speak of propulsive resistances. It is through the creation and maintenance of propulsive resistances that we move in the water.
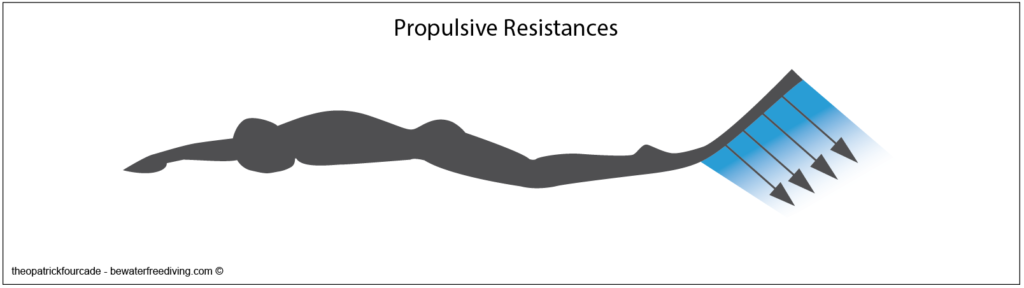
The term « propulsive drag resistance » is used for any resistances resulting from or contributing to propulsive support.

Synthesis of passive and active resistances
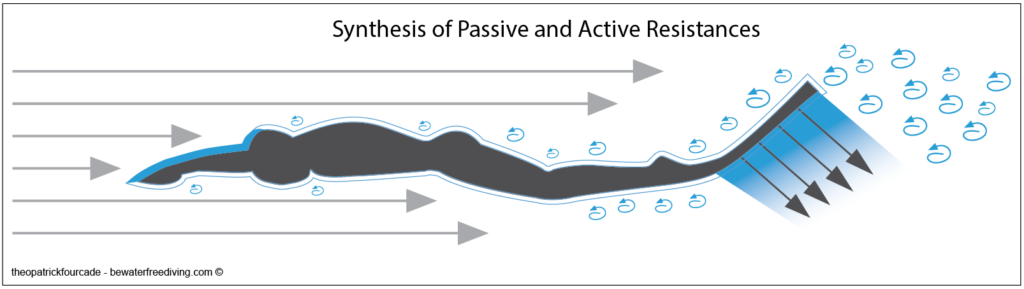
Swimming with a monofin is the fastest of the swims, it is the « Formula 1 » of fins sports. The swimming technique that has evolved over the last 50 years is the one that best adapts to the reduction of swimming resistance. It produces the propulsive motion with the lowest propulsive drag resistance ratio.
Hydrodynamic law applicable to the monofin
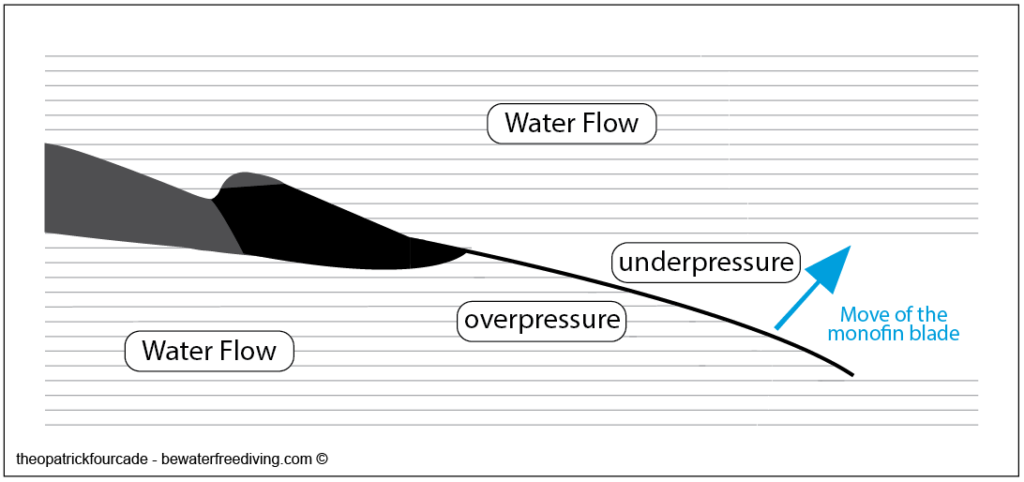
Overpressure and Low pressure
The monofin like an airplane wing ?
It can be considered at least theoretically that the monofin blade under the effect of the water flow (laminar flow) which passes under and over the monofin blade, creating a high pressure zone (overpressure) and a low pressure zone (underpressure), is assisted in its horizontal replacement. Areas of overpressure push, areas of underpressure attract.
Resistance and Speed : R=KSV^2
It is interesting to understand the equation R=KSV^2, which includes the mechanical components of the swimming resistances (R = Resistance, K = Coefficient corresponding to the Total Body Shape, S = surface of the Frontal area, V = Speed).
NB : R=KSV^2 is true for a rigid body. The swimmer has a variable geometry and tries to minimize resistances. Physilogical measurements show that for a swimmer the exponent is less than 2. Di Prampero gives an exponent of 1,2 which seems to be suitable for a swimmer underwater. For surface swimming an exponent of 1,5 would be more realistic.
In this corrected equation : R=KSV^1,2 the speed increased by an exponent shows that it is a determining component.
If the speed is zero then the swimming resistance is zero. On the other hand, this factor has a major influence on the swimming resistance when moving in the water.
If the Speed is 1m pers second, we have : R=KxSx1
If the Speed is 2m pers second, we have : R=KxSx2,3
In Freediving we often speak of a speed of about 1m per second. The swimming resistances is therefore not increased by the Speed component, but the fact remain that if your swimming style is not hydrodynamic (K and S not efficient), then throughout your performance you will produce a greater effort than necessary to move forward.
As an indication, a finswimmer can reach 3,6m per second (R=KxSx4,65). Swimming fast is really confronting different types of resistances. A good lap time implies an ability to reduce swimming resistances. Each time you improve your time, then you will have objectively improved your style.
Swimming with a monofin for a freediver with an efficient style is not an impossible goal. Most of the technical defects that I obeserve in freedivers come mainly from a bad learning or outright non-learning of the technique of swimming with a monofin. This results in significant passive and active resistances which, if reduced, would result in being able to perform more easily, especially at the end of an effort, i.e. : less fatigue, less oxygen consumption, slowing the CO2 production, less accumulation of lactates, more serenity, more lucidity, more efficiency, less risk of loss of motor control, less risk of blackout.
You must therefore optimize your style by working on technique to overcome the swimming resistances. Remember to put regular (timed) speed series in your monofin technique training pool sessions (using a front snorkel for example or by practicing speed apnea). It’s essential !
Theo-Patrick FOURCADE
24/01/2020
Next post : Monofin technique
References :
– Approche Scientifique de la Natation Sportive, 1992 Didier Chollet
– La mécanique des fluides, 1978 Jacques Lachnitt
– La science de la Natation, 1968 James E. Cousilman
– The Energy Cost of Human Locomotion on Land and in Water, 1986 Di Prampero (equation N°17)
You are welcome to use information from the blog, but please specify the source with a link:
Theo-Patrick FOURCADE – bewaterfreediving.com ©
All the illustrations are copyright ©, please ask me before use.
Merci pour cet article très intéressant.
J’imagine que ces explications concernent la nage en piscine…
En mer, rajoutons les résistances liées à la composition de l’eau (plus ou moins salée) et aux courants : quelles sont les incidences du milieu sur la technique ?
Bonjour Isabelle, merci pour ton intérêt 🙂 Toutes ces infos sont valables en mer et en piscine, les mêmes lois de l’hydrodynamique s’appliquent puisque l’on est dans un milieu aquatique. - Avec courant, les résistances seront simplement plus importantes (Le nageur se positionnera au mieux afin de lutter contre le courant ou bien il cherchera à en profiter…) - Une eau plus froide ou plus chaude ne donnera pas les mêmes effets sur la glisse car effectivement la temperature change la “viscosité de l’eau” et donc cela aura un effet sur la performance cette contrainte est notamment liée aux résistances de friction (NB : Les compétitions en piscine, de natation ou de nage avec palmes, pour les grands événements tels que championnats nationaux ou jeux olympiques, sont règlementés et la température de l’eau est imposée afin de fournir toujours les mêmes conditions de performances en cas de record du monde). Le fait d’évoluer en milieu “fermé” (piscine) permet de contrôler un peu mieux le milieu et la performance. En milieu dit “ouvert” (mer, open water) le contrôle est moins évident, c’est souvent l’expérience de l’athlète et de son coach qui font alors la différence pour s’adapter aux contraintes du milieu. Les connaissances de bases en hydrodynamique que je tente d’expliquer permettent et en mer et en piscine d’appréhender le milieu dans lequel on évolue et d’adapter une stratégie « technique » en fonction de l’importance de telle ou telle contraintes hydrodynamiques.
« Quelles sont les incidences du milieu sur la technique ? »
Pour les connaître il faut dans un premier temps comprendre le milieu en identifiant ses contraintes (c’était le but de cet article) dans un deuxième temps il me faudra vous décrire les principes techniques qui tiennent compte des contraintes du milieu… Ce sera le but du prochain article : décrire les principes techniques qui permettent de s’adapter et de performer au mieux avec une monopalme dans un milieu aquatique (immergé).
Ces aspects sont parcourus et enseigner pendant la formation initiateur nage avec palmes de la FFESSM
Bonjour Lucien, heureusement que ces aspects sont vus durant la formation initiateur nage avec palmes (FFESSM) 🙂 Je n’invente rien, je fais juste un résumé de certaines notions de bases. Votre formation reprend les mêmes informations que moi, trouvées notamment dans les références que je cite plus bas dans l’article 🙂 . L’objectif de ce blog est de partager les bonnes informations avec les apnéistes qui utilisent une monopalme et qui n’ont pas accès à une formation comme celle que vous avez eu.
Merci !!!! trés interessant et utile!
Super ! merci pour le commentaire.
La vidéo est trop belle à voir ! Quel travail !
Heu… Merci Maman… C’est ma maman 🙂
C’est jusqu’à présent le meilleur article que j’ai pu lire sur le sujet! Je comprend mieux pourquoi il ne faut pas utiliser les genoux. J’attend avec impatience la suite!
Merci encore
Antoine
Bonjour Antoine, Merci pour le commentaire, l’idée était de faire un petit résumé de quelques notions permettant ensuite de mieux comprendre la technique de nage.
Merci pour le partage! Je n’aurais notamment pas crû que la vitesse entre directement dans l’équation.
Bonjour Pierre. tant mieux si cela peut vous aider à voir les choses avec une nouvelle approche. Merci pour le commentaire.
Deux jours après la publication l’article comptabilise plus 5600 vues, 4300 visiteurs, des connexions venant de 111 pays différents ! Pretty cool ! Merci pour votre intérêt !
Super article, très pédagogique.
On parle de monopalme, mais au final on pourrait appliquer les mêmes principes aux autres nages comme la bi-palme (ou la dnf pour la résistance frontale).
Du coup avec la résistance frontale j’ai compris pourquoi on nous parle toujours d’horizontalité ! Valable aussi pour les départs ! Et le fait que la vitesse soit au carré, ça explique aussi pourquoi on nous demande de pas pousser comme des malades sur les départs. Encore merci !!
Bonjour Enisse
Vous avez bien sûr raison, ces notions s’appliquent à tous les types de déplacement dans l’eau. Je fais le choix pour l’instant de tout rapporter à un athlète qui utiliserait une monopalme afin que ces notions lui apparaissent de façon très concrètes.
Et effectivement en bipalme avec les bras le long du corps, il ne sert à rien de pousser fort contre le mur. Cette position n’est pas hydrodynamique (K, la forme totale du corps n’est pas profilée) et vous allez en accélérant votre déplacement (V^1,2/1,5) considérablement augmenter les résistances frontales et au final produire un effort avec aucun bénéfice.
Malgré tout on peut améliorer un peu cette position, il va falloir que je prévois un article la dessus ! Cette position améliorée je l’ai baptisée RocketMan 🙂 … Promis je fais l’article très bientôt
Passionnant, quelle découverte!
A 71 ans, je pratique l’apnée depuis + de 25 ans dont presque autant en Monopalme, sûrement très mal car autodidacte en la matière, mais complètement addict à cette merveilleuse sensation de vitesse et de glisse que procure cette caudale artificielle. Ayant la chance de bénéficier de la BTV, il m’est arrivé, pour me faire plaisir, de foncer verticalement à + de 3m / s, à en croire mon ordi ! Si les Bi-palmes sont pour moi comme des prothèses, je ressens «profondément» la Mono comme une greffe, un prolongement (presque) naturel du corps! Je ne suis plus Humain à l’instant du canard !
J’attends donc avec impatience les prochains articles, toujours avide d’apprendre pour me perfectionner et, en tant qu’instructeur, pouvoir transmettre le meilleur aux plus jeunes !…
A suivre et merci !
Bonjour Dominique, c’est super de vous lire en exprimant cette passion pour les sensations en monopalme. Effectivement le mode de déplacement avec une monopalme nous transforme en homme aquatique 🙂 J’espère que les prochains posts vous apporteront de nouvelles informations.
Très bon travail de Théo – Bravo
vous pouvez découvrir d’autres petites connaissances en allant voir sur https://www.tours-nageavecpalmes.fr/ressources-de-formation/
Bonjour Fred merci pour ton message. Fred est une Référence en Nage avec Palmes vous apprendrez beaucoup en visitant son lien où il partage le fruit de ses recherches.
Roko Gracin wrote this comment on AIDA INTERNATIONAL (Facebook) he authorized me to publish our conversation :
R.G.: This article has some basic good points but the part on frontal area is not. The main problem is the assumption that freediver moves as a rigid body, as if being pulled by rope. If this was the case you could simply look at frontal area and conclude that larger area causes more drag. However, some freedivers (and all finnswimmers) are not rigid but they move along an oscilating (lets say sinusoidal) curve and each point on the body has its velocity which is not always pointing forward. This approach implies it is important to keep the body as straight as possible, but it is only true for the glide phase, Look at snakes swimming in water for example, what would be their frontal area?
My answer : That’s absolutely true. The surface that will be offered for advancement during the swim will be different depending on when you take a picture of the swimmer. Here to explain the notion of frontal resistance the swimmer in the illustration is in a fixed position. This picture can be misleading indeed… because we can easily imagine that the best way to swim is to stay on an axis and not to move any more, which is not true (it seems to me that it is a fact for everyone that the swimmer with a monofin moves more or less on a sinusoidal trajectory). The notion of frontal resistance just introduces the idea that you have to be profiled during your movement and to be profiled is to offer the smallest possible frontal surface.
If I had described in this “article” the swimming technique then the reader might have better understood the nuance.
Thank you for pointing this out.
Bonsoir Theo, merci bcp pour ce magnifique article! J’ai essayé de trouver l’étude physiologique de Di Prampero qui définit l’exposant 1,2 au lieu de 2 – pourrais tu indiquer la référence exacte STP.
Merci bcp par avance
Maher
Bonjour Maher, merci pour ce commentaire. Voici le document en question (équation N°17) : DI PRAMPERO
Hello Theo
You explained very clearly. I easily understood the basic knowledge. Very nice. Thank you for this information. I’m waiting for the next post.
Thank you very much!!
Thank you very much ! 🙂
Stats for this article : 10100 views , 7400 visitors from 129 countries !!!
Enjoyed every bit of your blog.Really looking forward to read more. Great.
Thank you for your comment !
I’m trying to block time to write more !!!
I do it asap !
Very descriptive blog, I liked that a lot. Will there be a part 2?
Hello, thank you for your comment. Yes will have a part 2 and more. I am working on it. 🙂 You can subscribe to the newsletter to keep in touch. Best Regards.
My brother suggested I might like this website. He used to be totally right. This post actually made my day. You cann’t believe simply how much time I had spent for this information! Thank you!
you will get more in the next article 🙂 thank you for your comment
Like!! I blog frequently and I really thank you for your content. The article has truly peaked my interest.
Great 🙂 !!! thank you !!!
Nice post. I learn something new and challenging on blogs I stumbleupon everyday. It’s always exciting to read articles from other authors and use a little something from their sites.
Cool if you find my article useful ! Next one will blow you 🙂
I had been suggested this website by my cousin. I’m not sure whether this post is authored by him as nobody else know such detailed about my trouble. You happen to be incredible! Thanks!
Thank you. I hope the next article will help you more !
Spot on with this write-up, I absolutely think this web site needs far more attention. I’ll probably be returning to read through more, i appreciate you the advice!
thank you for this comment !
certainly such as your web-site however you must check the spelling on quite a few of the posts. Many turn out to be rife with spelling problems and that i find it very troublesome to know the truth on the other hand I’ll certainly come back again.
sorry to read your comment. i don’t speak good english which explains the spelling and grammar mistakes. my friends who are english give me a hand on their free time… we’ll try to do better. but don’t hesitate to let me know the worst passages.
Hello mates, good article and good arguments commented here, I am really enjoying by these.
i enjoy too 🙂 thank you
It’s gonna be ending of mine day, but before ending I am just looking at this wonderful article to increase my know-how.
nice nice !!! happy to be usefull
Very rapidly this website will likely be famous among all blogging visitors, as a result of it’s good posts
would be cool !
Wow that was odd. I just wrote an incredibly long comment but after I clicked submit my comment didn’t show up. Grrrr… well I’m not writing all that over again. Anyhow, just wanted to say wonderful blog!
sorry to read that !! thank you for your comment !!!! i hope you will appreciate the next article about the monofin technic
It’s an awesome paragraph in support of each of the internet viewers; they will obtain advantage from this I am certain.
Things are very open using a specific clarification of your issues. It had been really informative. Your site is useful. Thank you for sharing!
thank you !!! I keed writing !!!
I actually do trust all the concepts you have introduced on your post. They’re really convincing and might certainly work. Still, the posts are too short for novices. Could you please lengthen them just a little from next time? Thanks for that post.
Hello Thank you for your comment. the next article will certainly satisfy you… waiting your comments… just be a bit patient …it is long to write 🙂
I just start to practice monofin, and I am so happy to see all those articles at the beginning stage, it helps the starter to know and understand the background the technical theory. Would be expected to see more sharing on the news!
Thank you 🙂 i am happy to share 🙂 i will continue 🙂
Merci Theo! Tres interessant!
Thank you Davide !!!